極座標系と加速度
極座標系の定義
極座標系は、位置を放射状の距離と角度で表現する座標系であり、物体の運動を記述する際に便利なツールです。位置ベクトル\(\vec{r}(t)\)は、動径方向の単位ベクトル\(\vec{e}_r\)と偏角方向の単位ベクトル\(\vec{e}_\theta\)を用いて次のように表されます。
\[
\vec{r}(t) = r(t) \vec{e}_r
\]
ここで、\(r(t)\)は原点から物体までの距離(動径)で\(\vec{e}_r\)は動径方向の単位ベクトルです。
加速度は速度の時間微分で定義されます。
\[
\vec{a}(t) = \frac{d\vec{v}}{dt}
\]
この式を極座標系に展開していきます。
極座標系の基底ベクトル
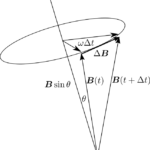
極座標系では、基底ベクトル\(\vec{e}_r\)と\(\vec{e}_\theta\)が時間とともに変化します。具体的には次の関係が成り立ちます。
\[
\frac{d\vec{e}_r}{dt} = \dot{\theta} \vec{e}_\theta, \quad
\frac{d\vec{e}_\theta}{dt} = -\dot{\theta} \vec{e}_r
\]
ここで、\(\dot{\theta} = \frac{d\theta}{dt}\)は角速度を表します。
これらの関係を用いることで、速度や加速度を極座標系の基底で表現できます。
極座標系での速度ベクトル
物体の位置ベクトル\(\vec{r}(t)\)の時間微分を取ることで速度ベクトルを求めます。
\[
\vec{v}(t) = \frac{d\vec{r}(t)}{dt}
\]
位置ベクトル\(\vec{r}(t) = r(t)\vec{e}_r\)を代入し、積の微分則を適用します。
\[
\vec{v}(t) = \dot{r} \vec{e}_r + r \dot{\vec{e}}_r
\]
ここで\(\dot{\vec{e}}_r = \dot{\theta} \vec{e}_\theta\)を用いると、
\[
\vec{v}(t) = \dot{r} \vec{e}_r + r \dot{\theta} \vec{e}_\theta
\]
となります。
この結果から、速度は動径方向の速度成分\(\dot{r}\vec{e}_r\)と偏角方向の速度成分\(r\dot{\theta}\vec{e}_\theta\)に分解できることが分かります。
極座標系での加速度ベクトル
加速度ベクトルは速度ベクトルの時間微分として求められます。
\[
\vec{a}(t) = \frac{d\vec{v}(t)}{dt}
\]
先ほど得た速度ベクトル\(\vec{v}(t) = \dot{r} \vec{e}_r + r \dot{\theta} \vec{e}_\theta\)を微分します。積の微分則を適用すると以下のようになります。
\[
\vec{a}(t) = \frac{d}{dt}(\dot{r} \vec{e}_r) + \frac{d}{dt}(r \dot{\theta} \vec{e}_\theta)
\]
まず、動径方向の成分を計算します。
\[
\frac{d}{dt}(\dot{r} \vec{e}_r) = \ddot{r} \vec{e}_r + \dot{r} \frac{d\vec{e}_r}{dt}
\]
ここで\(\frac{d\vec{e}_r}{dt} = \dot{\theta} \vec{e}_\theta\)を代入すると、
\[
\frac{d}{dt}(\dot{r} \vec{e}_r) = \ddot{r} \vec{e}_r + \dot{r} \dot{\theta} \vec{e}_\theta
\]
次に、偏角方向の成分を計算します。
\[
\frac{d}{dt}(r \dot{\theta} \vec{e}_\theta) = \frac{d(r \dot{\theta})}{dt} \vec{e}_\theta + r \dot{\theta} \frac{d\vec{e}_\theta}{dt}
\]
ここで\(\frac{d\vec{e}_\theta}{dt} = -\dot{\theta} \vec{e}_r\)を代入すると、
\[
\frac{d}{dt}(r \dot{\theta} \vec{e}_\theta) = (\dot{r} \dot{\theta} + r \ddot{\theta}) \vec{e}_\theta – r \dot{\theta}^2 \vec{e}_r
\]
これらをまとめると、加速度ベクトルは以下のようになります。
\[
\vec{a}(t) = (\ddot{r} – r \dot{\theta}^2) \vec{e}_r + (r \ddot{\theta} + 2 \dot{r} \dot{\theta}) \vec{e}_\theta
\]
加速度の物理的解釈
上記の結果から、加速度は動径方向の加速度
\[
a_r = \ddot{r} – r \dot{\theta}^2
\]
\(\ddot{r}\)は動径方向の加速、\(-r \dot{\theta}^2\)は遠心力による成分と偏角方向の加速度
\[
a_\theta = r \ddot{\theta} + 2 \dot{r} \dot{\theta}
\]
に分解できます。\(r \ddot{\theta}\)は角加速度による成分、\(2 \dot{r} \dot{\theta}\)はコリオリ力に対応します。
極座標系の加速度の応用
極座標系の加速度は円運動や惑星運動などに応用されます。たとえば、等速円運動の場合、\(r\)が一定、\(\dot{\theta}\)が一定なので、
\[
\vec{a} = -r \dot{\theta}^2 \vec{e}_r
\]
となり、加速度が中心方向を向くことがわかります。
一方、惑星運動では、万有引力による力が動径方向に作用するため、加速度の動径方向成分と角運動量保存則から軌道が解析されます。
今回のまとめ
極座標系での加速度は、動径方向と偏角方向に分解して考えることで、物理現象を効率的に記述できます。特に、基底ベクトルの時間変化を考慮することで、直交座標系では見えにくい遠心力やコリオリ力が自然に現れます。極座標系は回転対称性を持つ運動を解析する際に不可欠なツールです。